面向每项仿真任务的生产就绪基础设施
同一SDK驱动两者——因为底层需求完全一致:一个在任何条件下都与现实行为相符的、照片级真实、物理精确、传感器忠实的合成世界。

训练人类操控高风险系统
从飞行模拟器和空管塔台训练到舰艇驾驶台和核电站操作员——沉浸式、高保真环境,在实际接触前提升操作员能力。
- 基于真实GIS数据的照片级真实环境——亚毫米地形、400公里能见度、精确大气和海况
- 沉浸式输出——球幕、CAVE、多通道OTW显示、VR/XR;同一代码库,支持所有配置
- 行业标准分布式仿真协议——CIGI、HLA、DIS;无需自定义适配器
- 多领域——从航天和航空到海军、地面车辆和水下
- 现成项目模板——固定翼、旋翼、无人机、维修
为什么选择仿真?真实设备训练无法安全地重复系统故障、紧急情况或罕见边缘案例——而仿真可以,无限次,且成本极低。与课堂或桌面训练不同,全3D沉浸式训练能建立真正的肌肉记忆,并产生可测量、可比较的绩效数据。
在合成环境中测试AI模型
生成无限量的标注训练数据。在部署前,跨越现实世界中无法模拟的数千种边缘案例验证AI决策逻辑。
- 运行于标准工作站——无需昂贵的服务器GPU集群
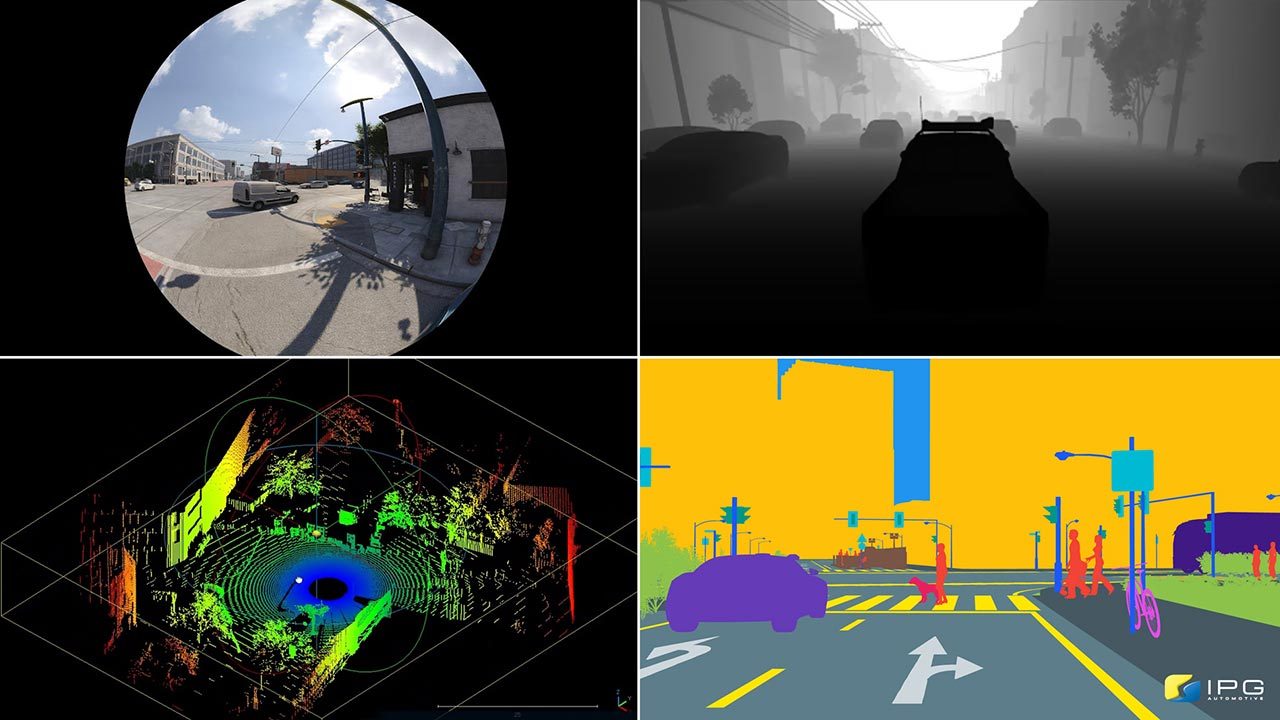
- 自动场景标注——每个像素固有的真实标签;零分类错误
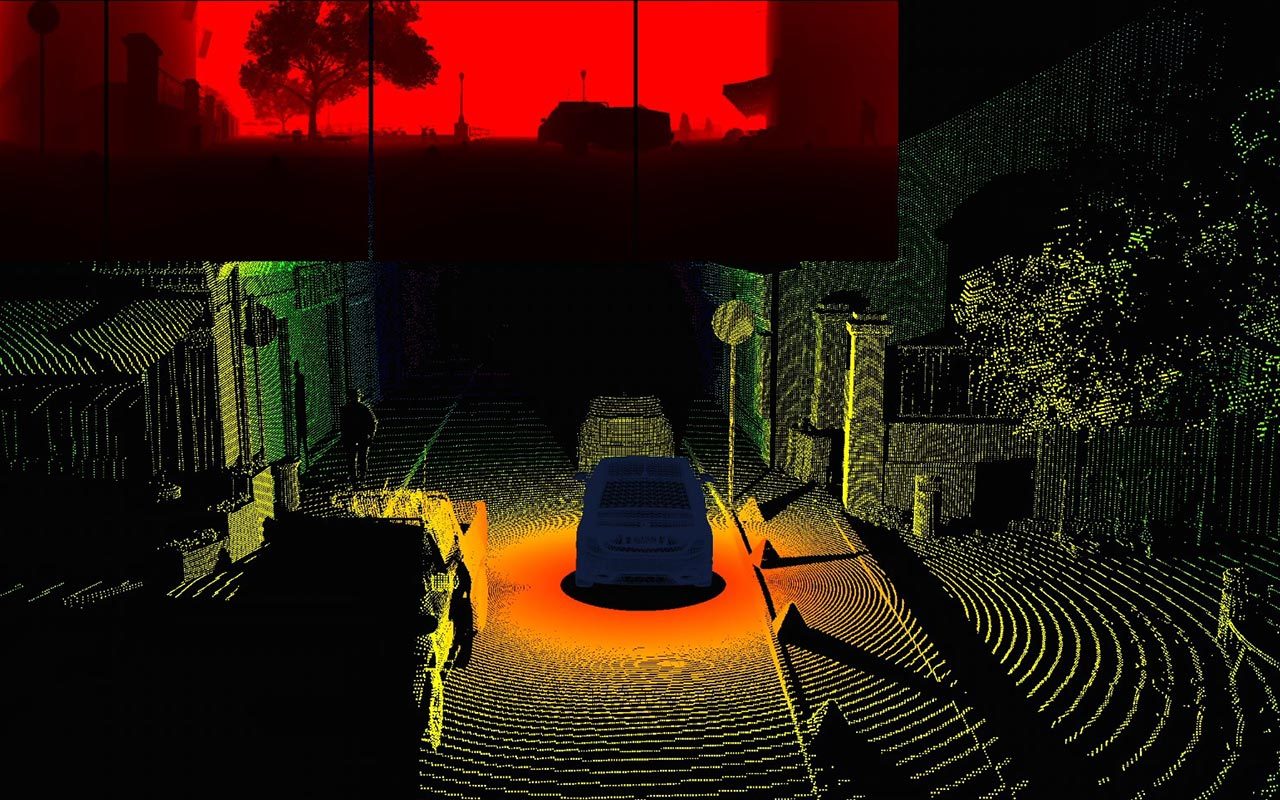
- 传感器仿真——激光雷达、雷达、热成像、深度、鱼眼、声纳;IMU、导航卫星、高度计
- 纯视觉场景训练——为AI应对传感器受限环境做好准备
- ROS2、Python DataBridge、MATLAB/Simulink——完整ML流程,支持SIL/HIL测试
- 真实标签导出——边界框、语义掩码、深度图;大规模程序化生成
为什么选择合成数据?真实世界数据无法覆盖罕见或危险场景,人工标注增加成本和错误。AI生成的视频缺乏物理精度、真实标签和时序一致性——运行成本与专用硬件相当。UNIGINE在您现有工作站上解决了所有这些问题。
仿真技术栈。
无需中间件。
您的项目所需的每项功能都已内置——无需第三方来源,无需从零开始构建。您的团队可以直接开始构建模拟器。
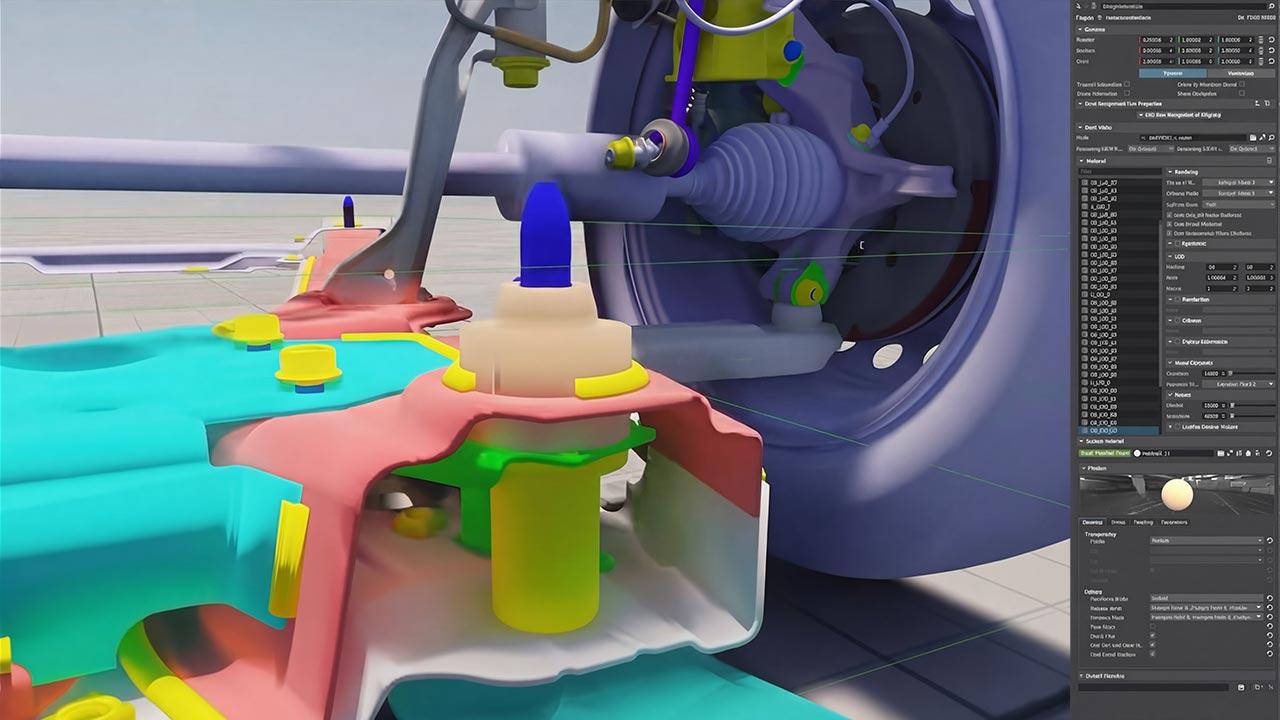
CAD数据支持

交通仿真
AI传感器套件——摄像头、激光雷达、语义分割
行星級世界保真度
UNIGINE全程使用64位双精度——每轴比标准32位引擎精确40亿倍。同一场景中实现亚毫米地形细节和行星级地理参考环境,无浮点抖动。
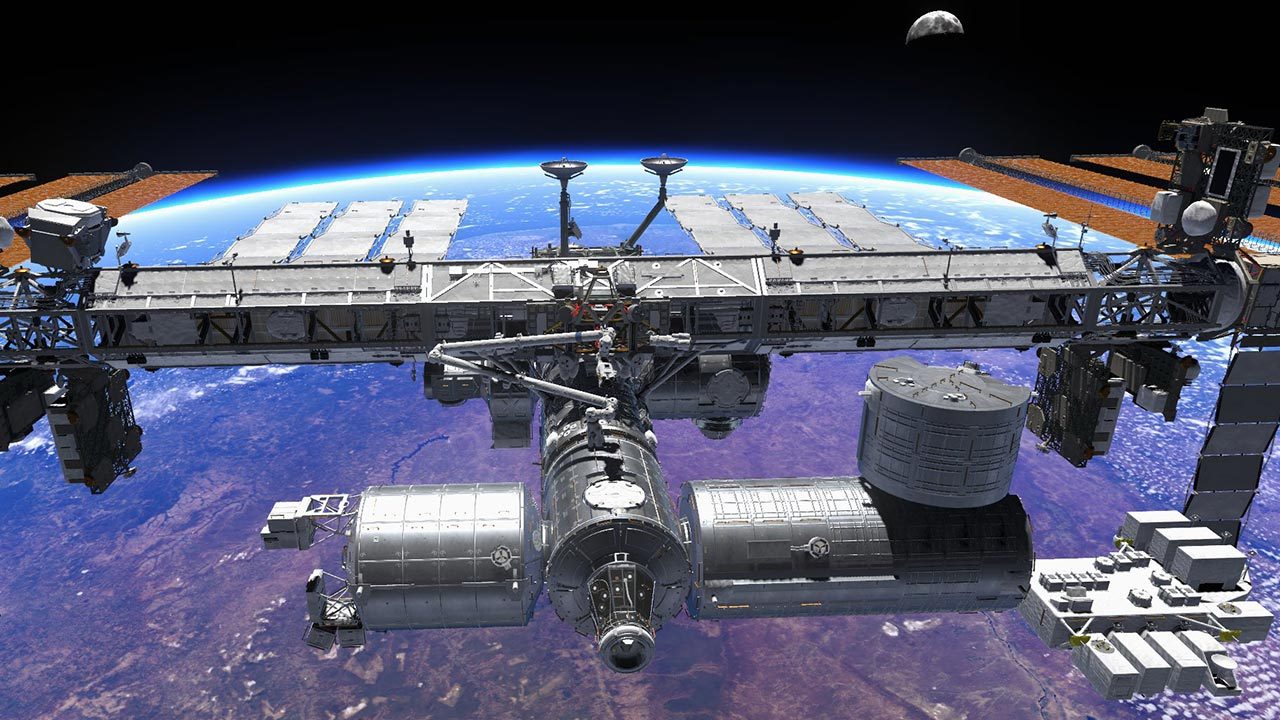
- 64位双精度 — WGS84及自定义大地基准
- 3D/CAD格式 — FBX、glTF、USD、IGES、STEP、STL
- 高斯泼溅 导入
- 星历系统 — 精确天体位置

- GIS格式 — GeoTIFF、OSM、KML、GeoJSON,150+种格式
- Sandworm工具 — 从GIS数据程序化生成世界
- ENU / NED / ECF 坐标系
- 1mm/像素 地形·动态运行时修改
真实世界的每个元素
地形、大气和海洋——每个都是独立完整的仿真系统,专为专业训练环境的精度要求而构建。

极致精细地形
高达1mm/像素分辨率,自适应硬件曲面细分。运行时动态修改——弹坑、沟壕、漏斗形地貌。最多1024种细节材质,异步多核流式传输,双筒望远镜/瞄准镜支持高达×20放大。
- 基于图层的流程,非破坏性编辑
- 多个高分辨率局部嵌入
- 支持团队同时编辑

真实大气与天气
3D体积云,包含积雨云在内的多层多类型云层、云影及真实光散射。区域天气控制、动态昼夜变化、完整日月星星历。400公里能见度。
- 气象监视雷达(WSR)仿真
- 区域天气API与风场仿真
- 雨、雪、雾、闪电效果
- 阳光光柱和体积光照

逼真水体
完整蒲福风级0–12海况,几何波浪。船舶尾迹仿真(船头和船尾)、程序化泡沫、无缝水下过渡和局部流体物理。
- 次表面光散射
- 船体体积减法
- CPU端波形数据访问
- 全局和局部水盆
开放架构。
无供应商锁定。
C++库,而非独立IDE。设计嵌入您的架构——标准协议、开放API、最小依赖,直接嵌入现有代码库和构建系统。

专业赛车模拟器

地面车辆动力学仿真
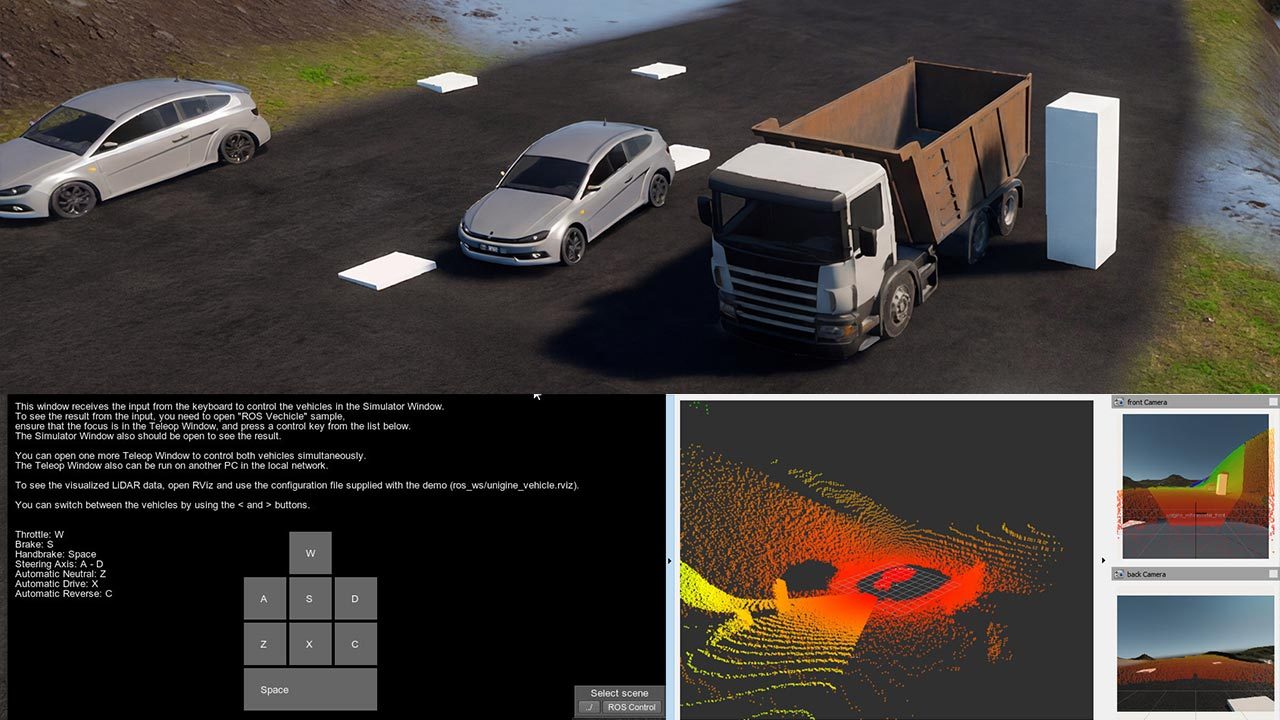
ROS2 + RViz——激光雷达传感器集成
- CIGI / HLA / DIS — IEEE/SISO标准接口;无需自定义适配器
- ROS2 — 机器人和自动驾驶系统,SIL/HIL测试
- MATLAB/Simulink — 动力学模型连接
- C++和C# — 均完全支持;适合来自任何主流引擎的团队
- HLSL, GLSL, UUSL — 着色器定制
- Python DataBridge — ML流程集成
- SQL数据库连接
- Qt, WPF, SDL — 嵌入现有应用窗口和UI框架
- Windows / Linux — DirectX 12, Vulkan
消费级硬件上的实时渲染
在配备独立GPU的标准PC上实时渲染——无需专有硬件、无认证硬件要求、无服务器GPU集群。UNIGINE在您团队现有硬件上交互运行。
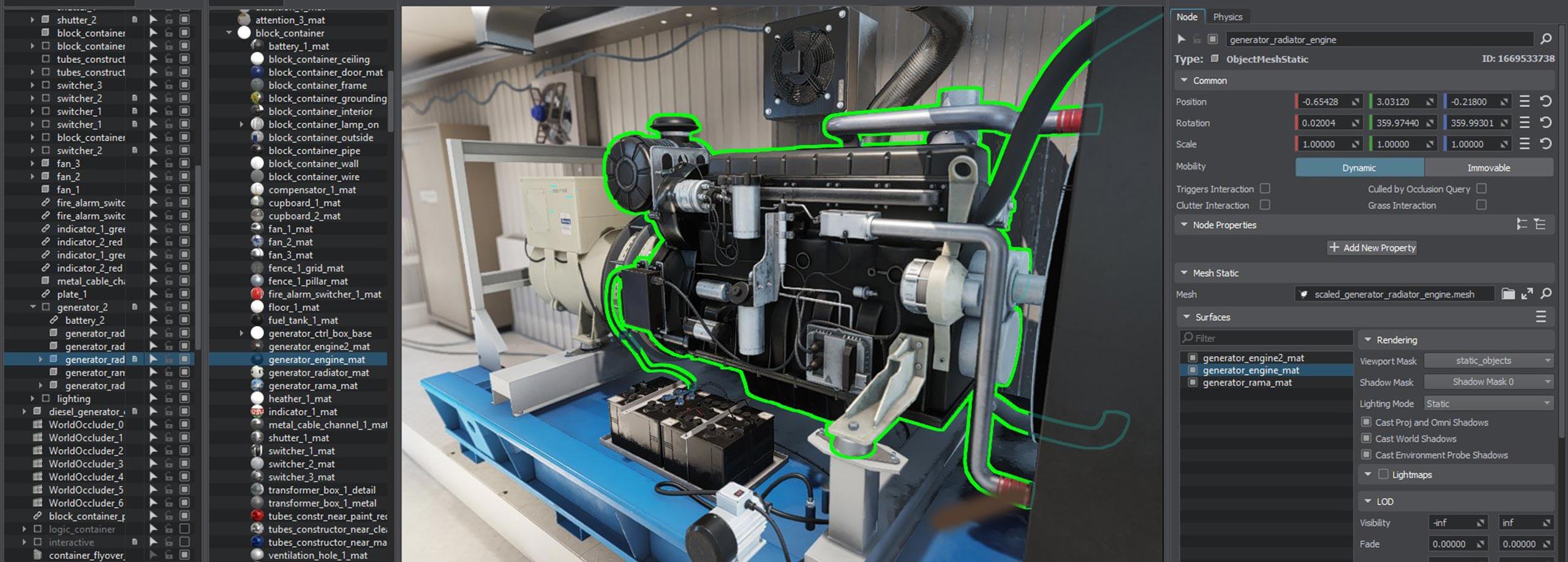
UNIGINE 2编辑器——实时资源检查与材质分析
负载下稳定——在其他引擎承压失效的安全关键部署中得到验证
DirectX 12和Vulkan——与主要CPU和GPU供应商工程团队密切合作
90+ Hz VR优化渲染·超音速飞行速度支持·快速LOS/HAT测试
随处显示
同一代码库驱动所有显示配置——从单台桌面显示器到拥有数十个联网渲染节点的360°球幕模拟器。无需单独构建,无需更改渲染流程。

多屏环绕显示阵列

VR/XR头显训练

曲面球幕投影模拟器
桌面
用于开发、测试和轻量级训练配置的单平面屏幕输出。Windows和Linux,DirectX 12和Vulkan。
多屏与触摸屏
指挥中心、作战室和桌面训练环境的多显示器环绕配置和触摸屏面板。
沉浸式显示
球幕、CAVE、曲面柱形投影、视频墙——网络多通道渲染,所有节点帧同步输出。
VR/XR头显
PC连接VR头显和支持色键的XR混合现实头显。90+ Hz优化渲染。适用于专业仿真和维护培训。
云端与无头模式
容器化和云端AI训练流程的无头模式——无需显示器大规模运行仿真,完全可脚本化和自动化。
Web流式传输
通过Web浏览器远程访问仿真输出——包含交互控制。在服务器上运行模拟器,从任何地方访问。
UNIGINE Sim 相较如何
与买家考虑的三种真实替代方案进行评估——每种在某一领域具有优势,其他方面受限。

工业维护培训——AR程序叠加

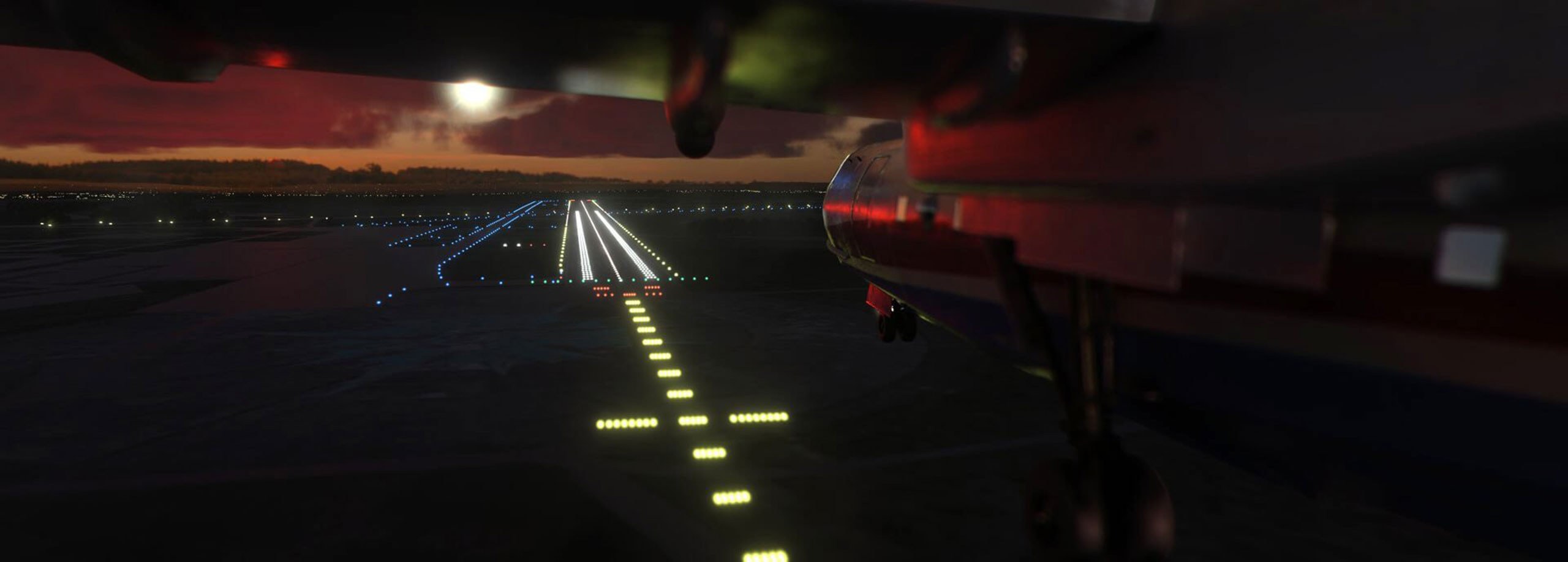
航空——照片级机场直升机仿真

城市環境-基礎建設與智慧城市模擬
| 专用培训模拟器 | 开源人工智能仿真平台 | 游戏引擎(自制仿真) | UNIGINE Sim | |
|---|---|---|---|---|
| 传统IG,单领域… | 领域特定,社区驱动… | 通用,改装… | ||
| 领域覆盖 | 按设计单领域——航空、海军或地面;无跨领域复用 | 按设计单领域——如仅城市驾驶或仅机器人 | 任意领域,但仿真行为须完全自定义构建 | 航空航天、海军、地面、工业、机器人——以及共享资源和环境的多领域联合操作 |
| 人类操作员培训 | 核心目的——沉浸式培训环境,成熟工作流程 | 非为此设计——仅程序化环境,无人在环培训 | 可行但需要大量定制工作;不含仿真技术栈 | 完整操作员培训——同一环境同时服务AI流程,无需重复资源或基础设施 |
| AI训练流程 | 非为此设计——无传感器仿真,无自动标注 | 核心目的——传感器仿真、自动标注、ROS2;领域锁定 | 需要第三方工具和自定义集成工作 | 所有领域内置——同一环境同时服务人类操作员培训和AI流程 |
| 以视觉保真度保障传感器精度 | 达到仿真级视觉效果,但未针对 AI 传感器输出管线进行优化 | 物理优先,视觉效果次之——或渲染质量受限于底层游戏引擎,控制能力有限 | 可实现高保真,但传感器仿真需定制开发 | 仿真级渲染器,支持激光雷达、雷达、热成像、深度传感器——专为传感器精度打造 |
| 专业支持 | 可获取供应商支持,但通常价格昂贵且响应缓慢 | 社区维护——无专业支持 | 仅限社区论坛——任何付费层级均无专业支持 | 引擎开发工程师、直接对接、快速响应——包含在每份 Sim 合同内 |
| 64位世界坐标 | 通常支持——专业图像生成平台的标配 | 普遍受限——并非为地理参考的行星级环境设计 | 大多数游戏引擎不支持 | 所有版本——发布以来的核心架构特性 |
| 开放API/无锁定 | 主要为专有脚本环境 | 开源,但单域架构限制了其在原始范围之外的重用范围 | 完整API访问,但架构基于游戏引擎范式,而非仿真 | 完整C++/C#访问;可嵌入C++库,而非独立IDE |
| 授权稳定性 | 昂贵的永久许可+年度维护;版本锁定风险 | 社区依赖风险——路线图和寿命无商业保证 | 历史上曾发生条款变更;已证明存在运行时费用风险 | 年度订阅,2005年以来原则不变;无收入分成费用 |

受构建真实系统的团队信赖
"我们有机会使用过多种图形和游戏引擎,而 UNIGINE 无疑是实现我们目标的最佳中间件,这得益于其强大的功能、工具以及技术支持。"
Iván Cuevas
项目经理,Arisnova — 西班牙
"在评估不同引擎时,UNIGINE 的高实用性和强适应性最终促成了我们的选择。它为 NAUTIS 打开了新的可能,让我们能够打造理想中的产品。随着长期合作的持续,UNIGINE 不断为 VSTEP 提供最新技术,我们的客户也从中获益良多。"
Paul Bouchaut
开发经理,VSTEP — 荷兰
"我们非常高兴与 UNIGINE 这一新的可视化合作伙伴开展合作。全新的 MovieNX 强调了我们的目标:以高度真实且可复现的方式构建真实试驾的数字模型。这也是我们应对汽车开发中日益增长的验证需求,尤其是自动驾驶领域的重要举措。"
Steffen Schmidt
总经理,IPG Automotive — 德国
"Delauney 选择 UNIGINE 作为核心技术,用于开发公路工程设计与仿真的一体化解决方案,并在中国设计集团信阳高速公路扩建项目中取得了显著成果。我们选择 UNIGINE,是因为其具有竞争力的授权成本、及时高效的技术支持,以及在工程应用领域的深厚经验。"
Dr. Fang Yuan
袁方博士,研发工程师,Delauney — 中国
"UNIGINE Sim 是唯一一款能够满足 SOGECLAIR SIMULATION 在模拟器功能方面需求的企业级商业游戏引擎。我们的模拟器基于 UNIGINE 2 Sim,实现了行业领先的视觉真实感。多年来,SOGECLAIR SIMULATION 始终走在前沿,提供高质量、沉浸式、真实感强的图形效果,以提升训练效果。"
David Todd
图形与赛道设计团队负责人,SOGECLAIR — 法国
"Unigine 2 Engine(Sim 版)的性能和图形保真度令人印象深刻。这标志着比我们以前使用的软件有了很大的改进。我尤其喜欢控制自定义渲染调用的方式。非常灵活,很容易使用。渲染大规模景观是我们的一个关键特点。 我们获得 UNIGINE Sim 的授权,可继续为 Modelica 开发“DLR 可视化库”。这将确保我们的软件将继续提供最高的图形质量以实现高级、逼真的可视化效果,同时仍然易于集成到模拟中"
Tobias Bellmann
DLR 系统和控制创新实验室 (SCIL) 主任 — 德国
"在我们使用 UNIGINE 的过程中,我们对于系统和视觉质量的定期更新和改进印象深刻。UNIGINE 能够处理超大型仿真环境,因此是一流的实时仿真解决方案。"
Steve Brodie
CEO, Ai3D首席执行官 — 澳大利亚
"我在 Unigine SDK 方面的经验丰富。内容丰富且详实的 API,有许多示例,通过代码简单明了解释概念 — 一切都唾手可得。我能够在运行时执行任何任务 — 这对我们来说是一个非常重要的特性,因为整个场景是由用户在运行时生成的。论坛真是太棒了 — 我可以问任何问题,并且 UNIGINE 小组很快就会给我一个建设性答案”。
Adrian Rzeźniczak
ArCADiasoft 软件开发与技术支持部门程序员 — 波兰
"UNIGINE 2 offers the best cutting-edge visuals with incredible simulation features that exceeds all other simulation competitor products while being more affordable. Couple that with a team that is truly innovative and world-renowned for its technology and you get a product that will last the test of time."
Eric Liu
CEO, UNISOL Technologies — China
与了解您领域的工程师交流。
大多数评测从30分钟技术通话开始——无PPT,无销售推销。您的项目、您的架构、我们的工程师。SDK完整访问权限通常在一天内提供。