

")



Deep Learning In Autonomous Vehicles / ADAS
Autonomous vehicle operation:
- Perception
- Localization
- Path Planning
- Control
Computer vision (Perception) learning requires a lot of visual data, which can be easily generated by real-time 3D engine software
from virtual scenarios.
Virtual scenarios can be used for pre-validation of autonomous systems behavior (Control) as well (virtual test driving).
Requirements for virtual 3D environments:
- Photorealistic image quality
- Physically-correct lighting
- Multiple wide-angle surrounding cameras
- Sensor simulation (LIDAR, radar, sonar…)
- Access to semantic data of objects (labels)
- Procedural scene configuration (vehicle/pedestrian positions, obstacles, lighting, weather conditions)
Compared to conventional approaches (manual dataset gathering and labeling, vehicle testing tracks), using a 3D engine requires less time, effort, and resources.
Photorealistic Visuals
- Physically-based rendering
- Energy conservation model
- Dynamic lights, shadows, and reflections
- GGX BRDF: realistic speck from light sources
- Fresnel reflections, reflections on rough surfaces
- Screen Space Ray Tracing Reflections (SSRR)
- Configurable anti-aliasing algorithms
- Unique Screen-Space Ray Tracing Global Illumination (SSRTGI) technology
Physically-correct visualization of the learning dataset = reliable computer vision for real roads.


Virtual Cameras & Sensor Fusion
Surround Cameras

Multiple surround cameras can be implemented with linear or fisheye (panoramic) views. Monocular / stereo dash cam setups for ADAS are also easily configurable.
LiDAR

360° scanning laser sensor is supported. Distances to the surrounding objects can be fed into AI algorithms in real-time, regardless of lighting conditions.
Radar

Short-wave radars can be imitated with fast access to the scene depth data. The same precise data can be used for short-range sonar imitation.
Special-Purpose Sensors

UNIGINE 2 Sim can be used to imitate other types of special sensors, e.g. thermal, night vision, and infrared ones.
Georeferenced Scenes
UNIGINE 2 Sim SDK is built for the correct virtual representation of the real world, at scale.
- Increased object positioning precision: 64-bit precision per coordinate
- Support for 3D ellipsoid Earth model (WGS84, other coordinates systems)
- Support for geodata formats (elevation / imagery / vector)
- Ephemeris system for celestial bodies positions depending on time/coordinates
- The performance-optimized object cluster system


Automatic Data Annotation
UNIGINE 2 Sim scenes already contain the classification information for each frame, making them an auto-labeled ML dataset. Ground truth data can be easily accessed for each pixel. Unlike manual tagging, there is a 0% classification error.
- Per-object property system for semantic data
- Easy object masking
- Extensive access to the scene graph
- Fast object visibility checks
- Efficient occlusion control
- 24-bit material masks
- Object bounds info for segmentation
- evaluation



Easy Scenario Reconfiguration
You can get an unlimited number of scenarios by changing any of these variable parameters, which are dynamically controlled via API:
- Autonomous vehicle position
- Surrounding traffic
- Pedestrians
- Obstacles
- Accidents
- Road condition
- Lighting conditions
- Weather conditions
The increased number of situations and test cases explored in this way should improve system reliability dramatically.



High Performance
UNIGINE 2 Sim was designed to handle large, complex procedural scenes, filled with dynamic entities.
The 3D engine demonstrates high and stable performance even working on consumer-grade hardware. This proves useful and time-saving when it comes to iterative AI training.
There is the multi-years close cooperation of UNIGINE with leading hardware vendors (AMD, Intel, NVIDIA) on performance optimization.


Vehicle Dynamics Simulation
UNIGINE 2 Sim SDK includes a generic vehicle dynamics system, which can be fine for background traffic or prototype applications (before you bring
more sophisticated software algorithms or hardware-in-the-loop simulation in).
- Main vehicle systems: engine, gearbox, transfer case, axles, differential, wheels, suspension, steering, brakes
- Configurable drivetrain: FWD, RWD, 4WD, multi-axle vehicles
- Simulation of various surface conditions (dry, wet, snow-covered, or icy road, mud, and so on)
- Visual control/debug of parameters in real-time
There are also essential built-in components for traffic simulation (spatial triggers, pathfinding module).


Powerful C++ or C# API
Support for both C++ and C# programming languages provides decent flexibility for development teams. Both APIs are identical in terms of the access level:
- Deep access to the rendering pipeline
- Flexible multi-viewport mode
- Extensive access to the scene graph and all parameters
- CUDA support for fast GPU-CPU data transfer
- Raw texture access
- Extendible design for custom objects and shaders


Proven By Training Humans
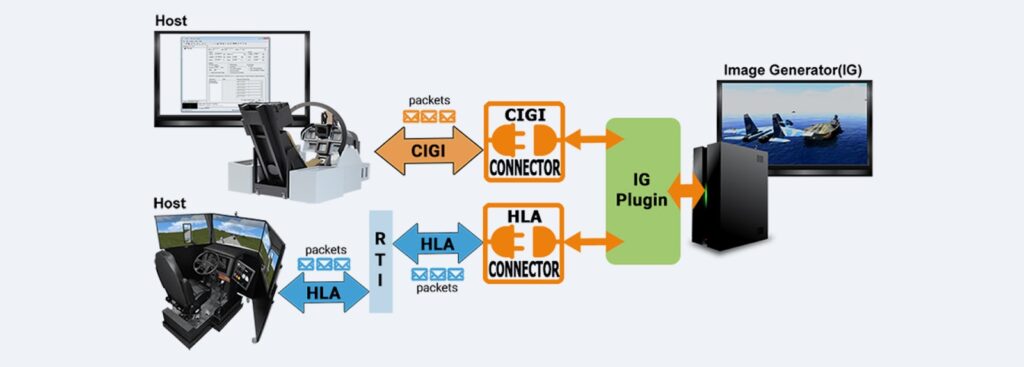
UNIGINE 2 Sim has been proven for years in building professional simulators to train people. The SDK was designed to work as a part of modular distributed systems.
There are a lot of common tasks in generating virtual 3D environments for humans and AI.
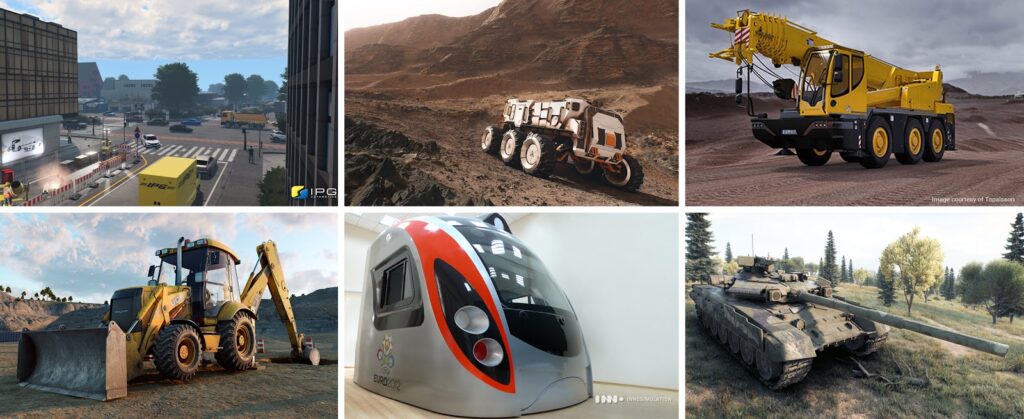
A great variety of driving simulation systems created by our customers are installed worldwide. Cars, trucks, special vehicles, trains, military vehicles – all sorts of ground transportation simulators are powered by UNIGINE Engine.
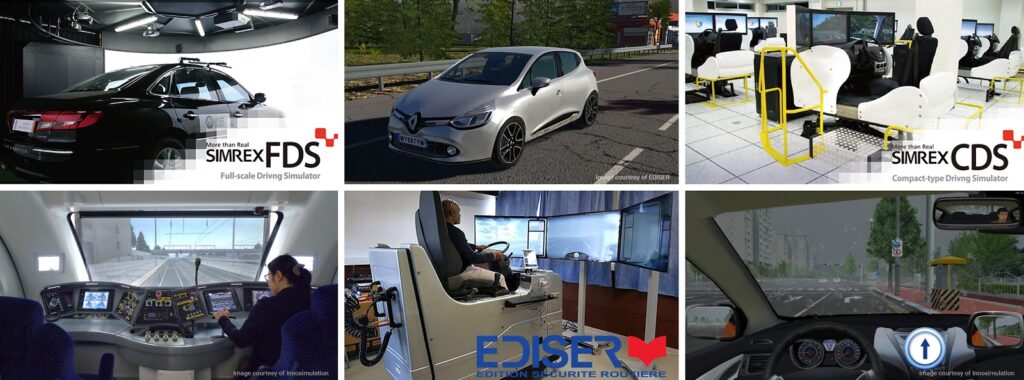
Various Types Of Vehicles
Streamlined Content Workflow
- WYSIWYG 3D scene (visual database) editor
- Landscape tool with support for procedural data refinement
- PBR workflow for 3D assets (compatible across modern engines)
- Support for CAD and GIS data formats
- 3D content library


Team Of Experts
UNIGINE team has been working with simulation & training tasks for more than ten years (and AI training-specific tasks for four years), having directly participated in many projects, receiving hands-on experience ourselves, and realizing many turnkey projects.
All our experience was converted into UNIGINE 2 Sim software platform; so, our clients can use ready-made components that have been developed especially for solving similar tasks.
Our technical experts are always here to help your team with any questions.

UNIGINE Advantages Summary
- Photorealistic image quality
- Camera and sensor output
- Automatic semantic data labeling
- Easy scenario reconfiguration
- Deep access to the rendering pipeline
- Embeddable into C++ / C# codebase
- Extremely performance-optimized
- Georeferenced scenes support
- A large number of out-of-the-box features
- Visual scene editor + 3D content library
- Generic vehicle dynamics simulation
- Support for various types of vehicles
- Proven in human-oriented simulators
- Brought to you by experienced, enterprise-oriented experts
Autonomous Everywhere
Regardless of the type of autonomous vehicles, their AI should undergo a training process, facing all the same common challenges,
before they hit mass deployment:
- Self-driving cars (SAE Level 4/Level 5)
- Autonomous flying drones and UAV
- Maritime autonomous surface ships and submarines
- Autonomous spacecrafts
UNIGINE 2 Sim is capable to visualize all of these scenarios.


Developers from 250+ companies across all the continents use UNIGINE technologies to realize their projects.


