Three Types of Academic Project
Academic institutions use UNIGINE across three distinct project types, each with its own edition. If you're doing applied research — building systems intended to work in the real world — you're in the right place.

Teaching & Curriculum
Introduce students to professional simulation tools. Real-time 3D, simulation basics, digital twin intro, AV and robotics foundations.
Recommended Edition
Community Free
Applied R&D
Commercial-grade SDK at academic pricing. Sensor simulation, automatic ground truth, ROS2, 64-bit environments, full ML pipeline integration. For labs building systems that will eventually deploy.
- All SDK modules — sensors, physics, rendering, protocols
- Automatic scene labelling; distributed and headless operation
- Helpdesk support; engineering reviews on request
From $15,595/year for 10 seats

Spin-Outs & Products
When the project ships, upgrade to Sim Edition for unlimited deployment rights and enterprise support. Same SDK, upgraded terms.
Recommended Edition
Sim
Who Can Apply
Academic Research edition is available to qualifying institutions and teams.
Non-commercial use only. Projects with commercial or defence funding exceeding 30% of the project budget require a Sim licence.
Eligible
- University and research institution staff and PhD students
- Government and publicly funded R&D labs
- Applied projects with a defined academic output
- Industry-funded research where commercial funding is below 30%
Requires Sim Licence
- Commercial product development or revenue-generating deployment
- Projects where commercial or defence funding exceeds 30% of budget
- No academic institution affiliation
Unsure? Describe your funding structure when you apply — we'll recommend the right edition.
Fields & Application Types
Academic Research edition is used wherever simulation fidelity, sensor accuracy, or environment scale matter — and where the research output is meant to work in the real world.

Perception, ADAS & Training Data
Generate unlimited labelled synthetic data for perception model training. Validate ADAS systems across SAE L2–L5 scenarios. Simulate edge cases — adverse weather, sensor degradation, rare traffic events — impossible to capture at scale in the real world.

Unmanned Systems AI
Train and validate perception and decision logic for aerial, ground, and underwater unmanned systems before touching real hardware. Multi-agent and swarm scenarios, anti-drone classification, ROV inspection. ROS2-native — the same code runs on real hardware via the ROS2 bridge.

Geo-Referenced Environments
Import real GIS, BIM, and CAD data. Build accurate large-scale environments for infrastructure research, urban planning, smart city, and lifecycle modelling. Correct at any scale.

Operator, Behaviour & Ergonomics Studies
VR/XR, dome, and multi-channel OTW output from the same codebase. Presence studies, operator training research, human factors, ergonomics testing, ADAS driver monitoring, and cognitive load experiments at full visual fidelity.
Dynamics & Algorithm Validation
MATLAB/Simulink loop-in, vehicle dynamics, and physically accurate environments for control algorithm development and SIL/HIL testing pipelines.

From Space to Underground
Scenarios ranging from orbital and atmospheric flight to surface operations, maritime, remote sensing, and subsurface environments — where 32-bit engine precision fails and physical scale matters. Accurate atmosphere, sea states, and ephemeris throughout.
Commercial-Grade SDK
at Academic Pricing.
Access to the same core engine, physics models, and sensor simulation used in production simulators — licensed from $15,595/year for 10 seats for qualifying research projects. Full SDK capabilities available; deployment rights and commercial use require the Sim Edition.
- Sensor simulation— LiDAR, radar, thermal, depth, fisheye, sonar, IMU, NavSat; automatic ground truth for every frame; zero classification error
- 64-bit double precision— planet-scale geo-referenced environments, 150+ GIS formats, sub-millimetre terrain; correct where 32-bit engines jitter
- ROS2 native bridge— same simulation code runs on real hardware; direct integration with standard robotics and AV stacks
- ML pipeline integration— Python DataBridge, MATLAB/Simulink; bounding box, semantic mask, and depth map export at scale
- Distributed & headless— CIGI, HLA, DIS protocols; run large-scale pipelines on clusters without a display
- C++ and C# APIs— full source-level access; embeds into existing research codebases and build systems as a library, not an IDE
Research built on the production engine. Because you're working with the same physical models and sensor pipeline used in deployed systems, results and trained models don't need to be re-validated when you move to production.

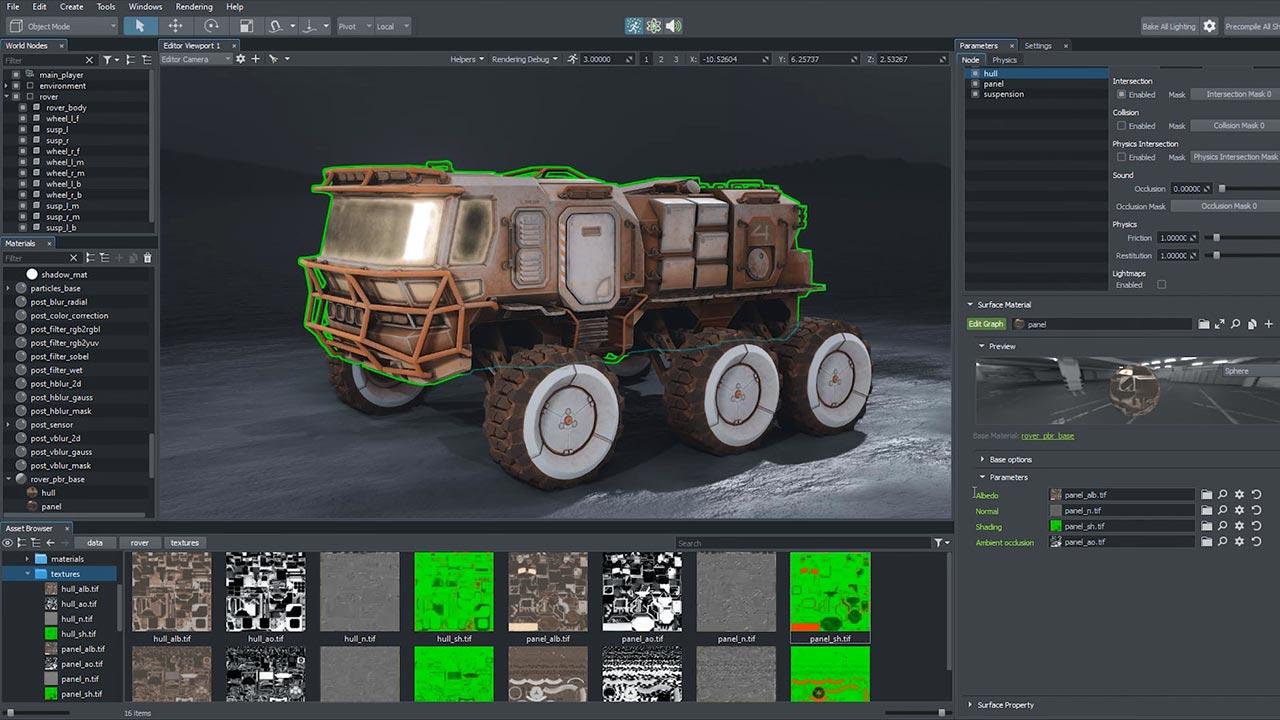
Photorealistic Rendering
Dynamic weather, volumetric atmosphere, accurate sea states, terrain deformation — same visual pipeline as certified training simulators.
Automatic Scene Labelling
Inherent ground truth for every pixel. No post-processing, no manual annotation — produces labelled data at the speed of simulation.
Multi-Domain in One SDK
Aerospace, naval, ground, industrial, robotics — reuse environments, sensor models, and assets without rebuilding.
Professional Support
Helpdesk by simulation engineers, not a generic queue. Engineering review sessions on request under NDA — code, architecture, or performance.
Why Not a Game Engine or Open-Source Sim?
Most academic simulation relies on tools that are accessible but not accurate enough for applied research. UNIGINE Academic Research closes that gap without requiring a platform change at deployment.
| Purpose-Built Training Simulator | Open-Source AI Sim Platform | Game Engine (DIY sim) | UNIGINE Academic Research | |
|---|---|---|---|---|
| Legacy IG, single-domain… | Domain-specific, community… | General-purpose, adapted… | ||
| Domain coverage | Single domain by design — aviation, naval, or ground; no cross-domain reuse | Single domain by design — e.g. urban driving only, or robotics only | Any domain, but simulation behaviour must be fully custom-built | Aerospace, naval, ground, industrial, robotics — and multi-domain combined operations with shared assets and environments |
| Human operator training | Core purpose — immersive training environments, established workflows | Not designed for this — programmatic environments only, no human-in-the-loop training | Possible but requires extensive custom work; no simulation stack included | Full operator training — and the same environment also serves AI pipelines, with no duplication of assets or infrastructure |
| AI training pipeline | Not designed for this — no sensor simulation, no auto-labelling | Core purpose — sensor simulation, auto-labelling, ROS2; domain-locked | Requires third-party tools and custom integration work | Built-in across all domains — same environment serves both human operator training and AI pipeline simultaneously |
| Visual fidelity for sensor accuracy | Simulation-grade visuals, but not optimised for AI sensor output pipelines | Physics-first, visuals secondary — or rendering quality tied to an underlying game engine with limited control | High fidelity possible but sensor simulation requires custom development | Simulation-grade renderer with LiDAR, radar, thermal, depth — purpose-built for sensor accuracy |
| Professional support | Vendor support available but typically expensive and slow | Community-maintained — no professional support | Community forum only — no professional support at any tier | Engine engineers, direct access, fast response — included at every Academic Research contract |
| 64-bit world coordinates | Typically supported — standard for professional IG platforms | Generally limited — not designed for geo-referenced planet-scale environments | Not available in most game engines | All editions — core architectural feature since launch |
| Open APIs / no lock-in | Largely proprietary scripting environments | Open-source but single-domain architecture limits reuse beyond its original scope | Full API access but architecture assumes game-engine paradigm, not simulation | Full C++/C# access; embeddable C++ library, not a separate IDE |
| Licensing stability | Costly perpetual licences + annual maintenance; version lock risk | Community-dependency risk — roadmap and longevity not commercially guaranteed | Historically subject to term changes; runtime fee risk demonstrated | Annual subscription, unchanged principles since 2005; no revenue-based fees |
Engineering Support Included
Academic Research licences include helpdesk access handled by engineers who understand simulation projects — not a generic support queue. Engineering review sessions are available on request under NDA.
- Helpdesk access — direct, typically responded to within one business day
- Engineering reviews — code or architecture review sessions on request, under NDA
- Industry collaboration — selected projects gain access to real-world use cases and scenario libraries from active customers
- Publication support — UNIGINE engineers available to review simulation accuracy in academic publications
Built for simulation since 2005 — not a side gig from games.
The engineering team supporting your academic project is the same team that ships production simulators.
Collaboration opportunities are offered selectively — based on research domain, quality, and alignment with active UNIGINE development priorities. Not guaranteed to all licence holders.
Request a Demo or Quote
Tell us about your project — domain, institution, and what you're trying to simulate. We'll assess fit, answer technical questions, and provide pricing for qualifying research projects.
Describe your project
Domain, institution, timeline, and what you're simulating.
Technical call
30-minute call with a UNIGINE engineer — your questions, your architecture.
SDK access & onboarding
Academic licences start from $15,595/year for 10 seats. SDK, helpdesk, and documentation from day one.